Må
trene mer!
Hjemmeside HP
Nyt Klimaet
før vi ender opp under isen
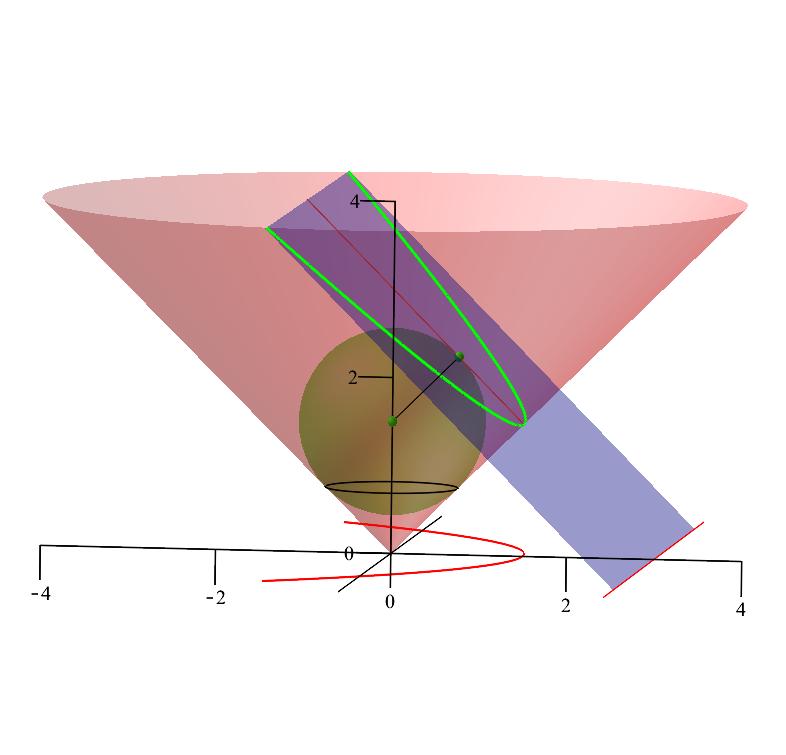
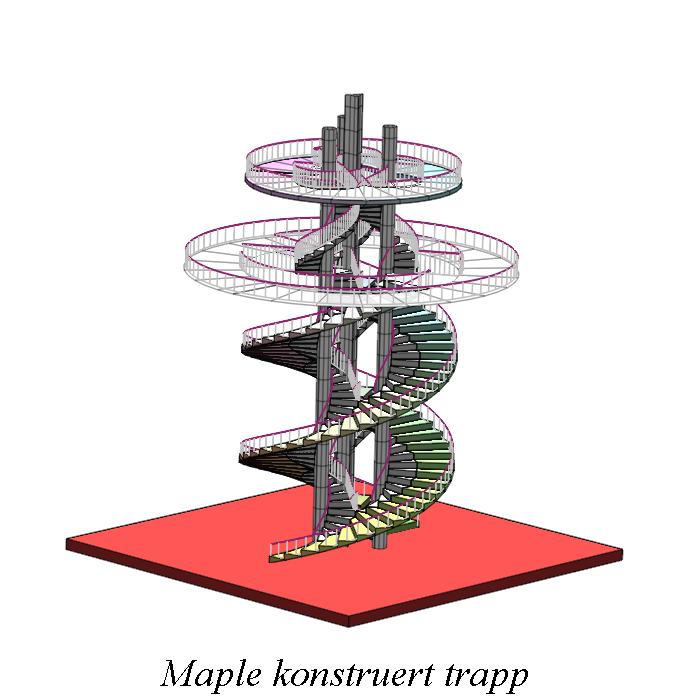
Maple
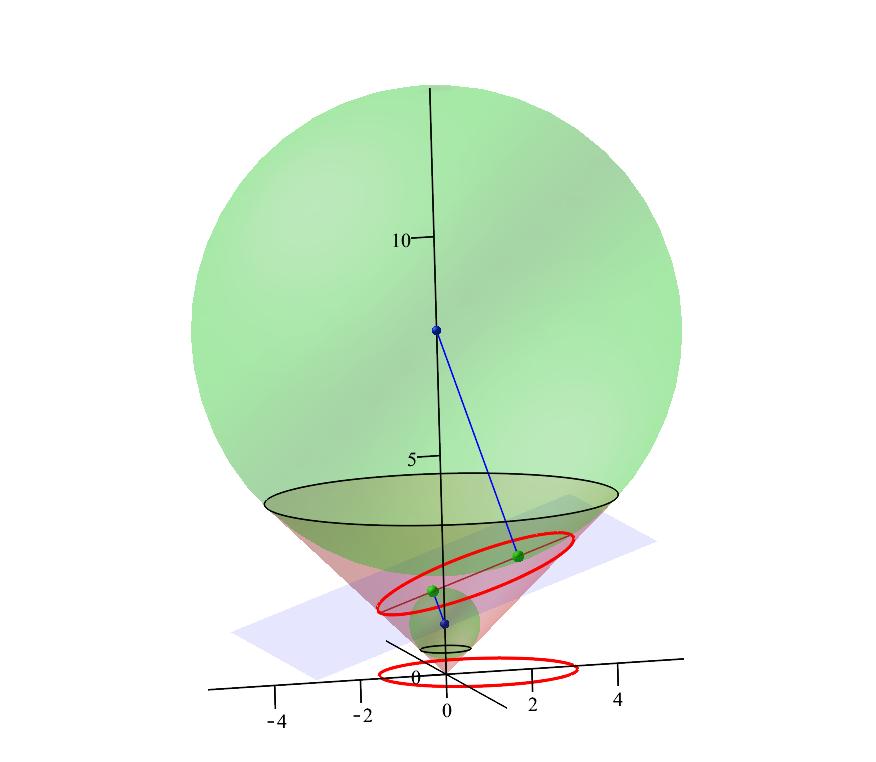
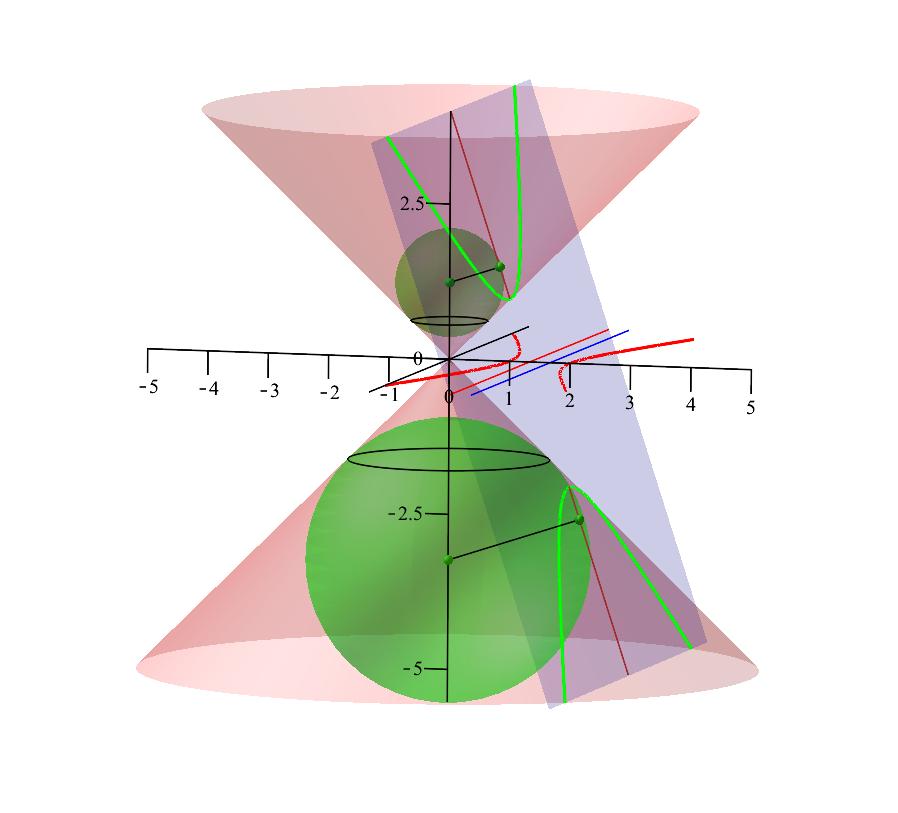
Velodrome IceCreamConeProof
Maple-animasjoner
Klikk også
på:
Lissajous ,
Newtons metode ,
Riemann-sum/Integrasjon ,
Kommuniserende
tanker ,
Klokka
går ,
Prosjektil ,
Mekaniske svingninger ,
Sinusfunksjonen ,
Stabilisering
av vann i en tank ,
Tanken
renner over ,
Fraktaler i
Maple ,
Bilder i Maple
og
annen
Maple-kunst .
Vil du se et
skikkelig Maple-skihopp i 3 dimensjoner , så klikk
HER!
Programvaren Maple bestilles
HER
Du kan nå meg på
følgende måte
Adresse
Rødsåsen 10, 3928 Porsgrunn
Epost
Harald Pleym
Personalia
Stilling
1. amanuensis/associate professor ved
tidligere Høgskolen i Telemark, Porsgunn
Utdanning
Cand.real., Institutt for Geofysikk,
Tidligere undervisningsfag
Matematikk
EDB
Publikasjoner
1978: Miljøklimatologi ,
Tapir forlag, ISBN 1979:
Rendalsprosjektet , En lokalklimatisk undersøkelse i forbindelse med
vannkraftutbygging i Rendalen. Analyse av temperaturdata, Norges
Landbruksvitenskapelige Forskningsråd 1988 :
Klima og Klimavariasjoner - Spredning av Forurensninger , forelesninger ved Telemark distriktshøgskole, Bø i Telemark,
kompendium
1989:
Miljøstudier , NKI-forlaget, ISBN: 82-562-2069-4
1990: Vær og
klima , forelesninger ved Telemark distriktshøgskole, Bø i Telemark,
kompendium
1991: Miljøleksikon ,
NKI-forlaget, ISBN:
1992: Drivhuseffekten,
nedbryting av ozonlaget , forelesninger ved Instiutt for
termisk energi, Norges tekniske høgskole (NTH), Trondheim, kompendium
1995: Lær
matematikk med Maple - Matematiske ,kompendium
1996: Lær
matematikk med Maple - Lineær algebra , kompendium
1997: Matematikk
med Maple - for Høgskoler og Universiteter , kompendium
1997:
Bli kjent med
Maple - Et matematisk dataverktøy ,
(lenken peker på ny
elektronisk utgave, 2017) 1998:
Interaktive Mapledokumenter
(eksisterer ikke mer, se
dok1 ,
dok2 ) 1999:
IT-utstyr i
fysikkundervisningen 1999:
Visualizing
Free and Forced Harmonic Oscillations International
Journal of Engineering Education, Volume 15, Number 6, Special Issue on
Mathematics Education of Engineers 1999:
Samples of
Animation from Teaching Engineering Mathematics with Maple V R5 ,
The Fourth Asian Technology Conference
in Mathematics - Applications of Technology in Mathematics Research and
Teaching for the 21st Century in Guangzhou, China 17-21 Dec
2000 Seip, K. L. and Pleym, H. Competition and predation in
a seasonal world. – Verh. Internat. Verein. Limnol. 27:
2001:
Sammenhengen
mellom karakterer fra videregående skole og Matematiske metoder 1
2001:
Dynamic
Maple Supplement to the Textbook: Calculus 6/e, Early Transcendentals-Matrix
Version by C. Henry Edwards and David E. Penney 2001:
Educational use of Maple in Engineering Mathematics
The Sixth Asian Technology Conference in
Mathematics - Applications of Technology in Mathematics Research and
Tecaching, ATCM 2001, RMIT University, Melbourne, Australia, 15-19 December 2001 2002:
Dynamic
Maple Supplement to the Textbook: Calculus 6/e by C. Henry Edwards and David E. Penney 2002:
Vi
har avskaffet matematikkens tyranni ,
Teknisk
Ukeblad nr. 40 2002:
Sandvik, G., Seip, K. L. and Pleym, H. An anatomy of interactions among
species in a seasonal world. – Oikos 99: 260–271. 2003:
Bruk
av bærbar PC og Underveisevaluering i Matematikk for ingeniører .
Innlegg på konferansen: Undervisning og evaluering i en ny tid,
Universitets-og Høgskolerådet, Bergen 28.-29 april, 2003 2003:
Elektronisk
undervisningsopplegg i Matematiske metoder I ,
Rapport utarbeidet på oppdrag fra
Prosessindustriens
Landsforening 2003:
Erik
Nords forskningsfrihet og røykeloven ,
Forskerforum
6/2003 2004:
Matematikk- Mapleseminar ved Greveskogen videregående skole, april 2004 2004:
Er ingeniørmatte viktig? ,
Teknisk
Ukeblad 21. juni 2005:
Maplesupplement til Mathema
Anvendt matematikk for bachelorstudenter av
Steffen Log, Tapir akademiske forlag 2006:
Korrelasjoner på Oslo Børs 2007:
Aksjer, indekser, valuta og korrelasjoner 2007:
Klimatrus sel,
politisk rammeverk og livsstil ,
innlegg i Dagbladet 2008-2017:
Maplesupplement til Mathema 1 og 2
Anvendt matematikk for bachelorstudenter av
Steffen Log, Tapir akademiske forlag 2009-2017:
Mathematics with Maple - A Comprehensive E-Book 2009-2017:
Bli kjent med Maple
- Et Matematisk Dataverktøy
201 5 :
Vinnere og Tapere på Oslo Børs i
2015 201 6 :
Vinnere og Tapere på Oslo Børs i
201 6 2017 :
Vinnere og Tapere på Oslo Børs i 2017 2018 :
Vinnere og Tapere på Oslo Børs i 201 8 2014 :
Klimahysteri 2014 :
Min mors beretning fra evakueringen 2014 :
Min fars beretning fra evakueringen 2014 :
Morfars beretning fra Karasjok - Finnmark 1903/1958 2016:
Strømpriser på NordPool-børsen
2017:
Endringer i Globale Hav-og Landtemperaturer
2017:
Endring i Absolutt Globalt Havnivå
2017 :
Klimaskeptikere og Klimahysterikere 2017 :
El Niño-Southern Oscillation
(ENSO) 2017 :
Isutbredelse i Arktis og Antarktis 2017 :
O zon
i Atmosfæren 2017 :
Vær og Klima 2017 :
Globale Klimaendringer
2017 :
Klimamodeller
201 9 :
Klimaet og Jordas undergang
201 9 :
Godt med litt varme før kulda setter inn
2019 :
Klimavennlig - Sol og Varme med Bismak
2020 :
Klimahysterikernes kollektive form for idioti
2021 :
Snikendring av matematikkeksamen i videregående skole
2021 :
Verdens Klima er i Unntakstilstand
2021:
Klokka er ett minutt på Midnatt
20 22 :
Global Oppvarming
2022 :
Opprydding etter klimafesten
O ppdatert
01.11.2025
av
Harald Pleym








{kind=link}
{kind=link}
{kind=link}